| Issue |
EPJ Nuclear Sci. Technol.
Volume 11, 2025
Euratom Research and Training in 2025: ‘Challenges, achievements and future perspectives’, edited by Roger Garbil, Seif Ben Hadj Hassine, Patrick Blaise, and Christophe Girold
|
|
|---|---|---|
| Article Number | 15 | |
| Number of page(s) | 12 | |
| DOI | https://doi.org/10.1051/epjn/2025013 | |
| Published online | 16 May 2025 | |
https://doi.org/10.1051/epjn/2025013
Regular Article
From robots to drones, the future of decommissioning operations – The CLEANDEM and XS-ABILITY projects
xUniversité Paris-Saclay, CEA, List F-91120 Palaiseau France
* e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
*** e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
Received:
16
November
2024
Received in final form:
27
January
2025
Accepted:
18
March
2025
Published online: 16 May 2025
Abstract
In recent years, there has been an increase in Dismantling & Decommissioning (D&D) operations of nuclear facilities, driven by the ageing of infrastructures and political decisions to phase out nuclear power. These operations, which can last from a few years to several decades, require mature and reliable techniques that meet international standards, local safety regulations, and radiation protection criteria. Despite developments in robotics, sensors, and digital tools that could reduce manual labor and risk exposure, their deployment remains limited due to financial and logistical constraints. The EU-funded projects CLEANDEM and XS-ABILITY address this challenge by upgrading advanced nuclear sensors and mounting most of them on autonomous terrestrial (CLEANDEM) and both terrestrial and aerial (XS-ABILITY) robots. These robots are and will be designed to assist operators by enabling continuous monitoring during D&D processes, reducing radiation exposure (CLEANDEM), and accessing hard-to-reach areas and difficult to measure radionuclides (XS-ABILITY). They also minimize human errors and organizational issues related to limited intervention time and repetitive tasks. CLEANDEM's results were showcased at its final workshop, and XS-ABILITY, launched October 1st 2024, will build upon these developments to further improve safety and efficiency in D&D operations. This work focuses on CLEANDEM's technical developments, and presents XS-ABILITY as one of its perspectives.
On behalf of the CLEANDEM and XS-ABILITY consortiums.
© M. Michel and G. Amoyal, Published by EDP Sciences, 2025
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. Introduction – The CLEANDEM project
By answering to the Horizon 2020 Nuclear Fission and Radiation Protection Research call for proposal on “Fostering innovation in decommissioning of nuclear facilities” (NFRP-2019-2020-09), the ambition of the CLEANDEM project was to deliver key achievements in respect of Dismantling & Decommissioning (D&D), enabling:
-
A significant reduction of the dose received by operators,
-
The optimisation of time and cost related to D&D operations,
-
High-quality level of measurements, and
-
Improvement of the competitiveness for the companies involved in the consortium.
From 2021 to 2024, ten key players in the European nuclear industry (CAEN, Orano, Ansaldo, RINA, TECNALIA, SOGIN, AiNT) and research institutions (CEA, INFN, ENEA) collaborated within the CLEANDEM consortium, led by CEA, to develop advanced radiation detection technologies for 3D-localized radiological measurements, most of which were mounted on an autonomous UGV (Unmanned Ground Vehicle). By integrating legacy facility data into a detailed 3D Digital Twin, these technologies have the potential to greatly enhance the planning and traceability of D&D operations, providing more accurate, reliable, and up-to-date radiological information.
Based on specifications from Orano, incorporating feedback from end-users and stakeholders, the upgraded radiological sensors include:
-
INFN's low-cost sensors for rapid neutron and gamma detection and CEA's distributed dose rate mapping (utilizing dose-sensitive optical fibres coupled with 3D shape-sensing for precise dose localization).
-
CAEN and CEA's enhanced neutron/gamma detection and identification sensors and gamma spectro-imaging for hotspot localization and identification.
-
Air and surface contamination monitoring systems, including a cryogenic system for radioactive carbon dioxide (14CO2) monitoring (ENEA), a PSD phoswich alpha/beta large surface contamination monitor (CAEN), and a beta/gamma surface pixelated contamination monitor (CEA).
With the exception of the distributed dose rate mapping and air monitoring systems, all sensors can be mounted on the Robotnik RB-VOGUI Unmanned Ground Vehicle (UGV), which features a UR 5e robotic arm (Universal Robots) upgraded by TECNALIA and Ansaldo for remote and autonomous operations. Data collected by the robot are then transmitted to RINA-CSM's Digital Twin, supported by Orano's PoStLAM tools, to consolidate and/or update all available (including legacy) radiological data.
The complete system underwent in-lab testing and was further tested at AiNT's Aachen technical centre in early 2024, before the final workshop held at SOGIN's EUREX Saluggia plant mid-April. There, alongside the demonstration of the robotic platform, each technology and the achieved work, including market analysis and training programs, were presented.
The overview of the developments carried out by the CLEANDEM Consortium is presented in Figure 1.
 |
Fig. 1. Overview of the developments carried out within the CLEANDEM project. |
2. Main results of the project
2.1. Technology specifications & concepts of operations
Early on in the project, Orano defined in the Technical Specifications, a comprehensive list of requirements of the various technological components integrated into the CLEANDEM project. This list is based on concrete needs identified by end-users in the nuclear industry. They also defined, with the help from SOGIN, the concepts of operations (CONOPS) including several reference and realistic in-situ tasks the equipped robot shall be able to face. These data served as inputs to technical WPs to facilitate the development process and help understand the specific needs of end-users.
Capitalizing on the experience of the Consortium at the end of the project, Orano also prepared a guideline outlining the challenges encountered during D&D operations, and demonstrated how the CLEANDEM solution could address some of these issues.
2.2. Robotic platform
As shown in Figure 2, the chosen platform for mounting the radiological sensors is an RB-VOGUI robotic mobile platform (Robotnik) equipped with a Universal Robots UR 5e robotic arm [1] and outfitted with advanced sensors, tools, and localization & navigation systems. The latter include both 2D and 3D Lidars (Laser Imaging Detection and Ranging) and capabilities for Simultaneous Localization and Mapping (SLAM).
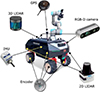 |
Fig. 2. RB-VOGUI UGV platform (Robotnik) equipped with an UR 5e robotic arm (Universal Robots), and embedded 99 sensors for localization and navigation. |
Visible in Figure 3, TECNALIA created a 2.5D navigation suitable to remotely and autonomously operate in cluttered indoor environments with high robustness navigation. 2.5D or pseudo 3D representation of the environment from a 3D map (also known as grid map or elevation map), is used to estimate the transitable space of the environment (i.e., the parts of the environment that the robot can reach by its own means). This was achieved by integrating the 3D Lidar reconstruction and 2D path planning; by using floor extraction from 3D map as a surface, transitability estimation from slope and terrain roughness, and planning and control using the Robot Operating System (ROS [2]) navigation stack.
 |
Fig. 3. 2.5D navigation solution developed by TECNALIA, integrating 3D Lidar reconstruction (upper left), 2D path planning, through floor extraction from 3D map as a surface (2.5D map, upper right, achieved using the grid_map module [4] in [2]), transitability estimation from slope, and terrain roughness and planning (lower left) and control using the Robot Operating System (ROS) navigation stack (lower right). |
With the help of Ansaldo and Orano, the platform was assembled, upgraded, and tested navigation-wise, as well as protected against contamination and radiation. The protection against contamination and radiation followed a study by Orano and TECNALIA presenting different recommendations in concepts and procedures designed to make easier the cleaning and reuse of mobile robotic platforms in nuclear industry, with the protection of the robot and its equipment from irradiation following the recommendations from [3]. Concerning contamination protection, the proposed solutions range from design recommendations, to designing tailored and removable/easily decontaminable protective cover, as well as the use of strippable resin.
With the help of Ansaldo, TECNALIA programmed the robotic arm, and studied the arm positioning and reachability. This is crucial for sensors mounted on the robot/arm and critical for surface contamination sensors which must be positioned as close as possible to the surface, without touching it. The platform with sensors embedded in different configurations allowed for deployment is shown in Figure 4.
 |
Fig. 4. Robotic platform configurations, for ambient gamma and neutron measurements (left), surface contamination monitoring (centre), and gamma hotspots localization and identification (right), through spectro-imaging [5]. |
2.3. Radiological sensors
The upgraded sensors, designed to enhance the quality and ease of radiological assessments, focused on:
-
Rapid dose rate mapping;
-
Gamma and neutron detection and identification, and
-
Soil and air contamination monitoring.
Data from these sensors are wirelessly integrated into the Digital Twin after the mission, facilitating accurate assessment and planning of radiological conditions and subsequent operations.
The first two developments for rapid dose rate mapping, undertaken by INFN and CEA, include neutron/gamma detection systems and a gamma spectro-imager.
2.3.1. MiniRadMeter gamma counters/spectrometers and gamma-blind MiniSiLiF neutron counters
INFN developed and tested prototypes of the MiniRadMeter gamma counters/spectrometers and gamma-blind MiniSiLiF neutron counters. They are visible, embedded on the UGV and on their own in Figures 4 and 5.
 |
Fig. 5. MiniRadMeter gamma counter/spectrometer and gamma-blind MiniSiLiF neutron counter (upper left), mounted on the UGV during the final workshop demonstration (upper right), and neutron (lower left) and gamma (lower right) spectra measured during the final tests at AiNT premises. |
The in-lab testing [6] and results during the final tests of these sensors at AiNT premises demonstrate their effectiveness. For gamma detection, the energy resolution at 662 keV improved from 9% initially, to 7.2% notably due to optimized light collection. Neutron detection reliably indicates the presence of neutron fields (as shown by the successful localization/identification mission results in Fig. 6), despite limited quantitative performance. These results are supported by the measured gamma and neutron spectra shown in Figure 5.
 |
Fig. 6. Robotic platform next to drum containing a 241Am source during the final tests at AiNT (left) and 2D mapping 140 showing the localization and identification of the four radioactive sources in the room (right). |
Their small size allowed mounting both sensors on the robotic platform during the final workshop in situ demonstration (see Fig. 6).
2.3.2. Nanopix spectrometry-imager
Within CLEANDEM, CEA, upgraded the Nanopix gamma spectro-imager with a new Timepix3 counting chip and improved electronics. It is now more suitable for UGV integration due to its compact design and low power consumption.
The Timepix3 counting chip, hybridized with a cadmium-telluride semiconductor, combined with a coded-aperture mask, allows to locate and identify a gamma radiation source, which can then be superimposed with the visible image feed. Compared to the previous version of Nanopix [7], the significant performance improvements of Nanopix3 now allow for rapid radionuclide location and identification; as visible in Figure 7, which shows the Nanopix3, mounted on the robotic arm and measured spectra during the final workshop demonstration. During this demonstration, a 140 MBq source 3 m away from the camera was located and identified in less than 10 s (less than a second at 1.5 m).
 |
Fig. 7. Nanopix3 gamma spectro-imager and multisource spectrum measured during the final tests and, during the final workshop demonstration, measuring a 241 Am source inside a waste drum. |
2.3.3. OSL/FO dosimetry and optical fibre shape-sensing
While it was a lower-TRL development not to be mounted on the robot, but providing relevant topographic and radiological data within hard-to-access and hidden zones, developments were carried out to combine the INSPECT system, based on OSL/FO (Optically stimulated luminescence/Fibre Optics) dosimetry, with the fibre optics shape-sensing (FOSS) technologies. Both the INSPECT system and the physical principle behind FOSS are shown in Figure 8. The latter technology allows, through knowledge acquired from the optical fibre's bending through laser interrogation, to reconstruct its three-dimensional shape.
 |
Fig. 8. INSPECT system, for 1D dose data acquisition (left), and shape sensing principle for 3D localization (right). |
At the start of the CLEANDEM project, limitations in terms of materials, methods and algorithms, had reached their limits, making it impossible to bridge the short length (typically <1 m [8]) reconstruction length (compatible for medical applications), to 10–15 m reconstruction range required for D&D applications. Hence the aim of these developments which were to revise, based on previous proprietary developments [10] and published data [9] the shape-sensing algorithm and hardware to overcome previous limitations, achieving a proof of concept, demonstrated in-lab up to 6 meters. Further development is needed to reach lengths required for D&D operations.
2.3.4. Gamma and neutron detection and identification sensors
CAEN's developments on gamma and neutron detection and identification first focused on sensor selection; then, through Monte Carlo simulations (Geant4), they completed the feasibility study and established detection responses and limits for scintillator-based sensors, part of:
-
The SNIPER-GN 2.0 gamma and neutron sources identifier, based on stilbene and CeBr scintillators for a first and secondary inspections, and
-
The GAMON-Drone gamma/neutron detection system based on NaIL scintillator for survey measurements (see Fig. 9).
 |
Fig. 9. SNIPER-GN 2.0 and GAMON-Drone measurement systems mounted on the UGV. |
Their capabilities were assessed with the help of ENEA, as well as during the final tests at AiNT; as shown in Figure 10, where the radiation intensity path is projected into the 3D reconstruction of the environment of the Digital Twin.
 |
Fig. 10. Point cloud of the AiNT premises and measured radiation intensity measured in the wake of the platform's path 188 (bottom left), and picture of the platform undertaking such mission (top right). |
Another CAEN development was related to a CZT spectrometer, which was mounted on the robotic arm during the demonstration of the final workshop (see Fig. 11), aims at better embedded gamma spectrometry for hotspot search and pipe inspection. A gamma spectrum measured by the CZT during the final tests at AiNT is also shown in Figure 11.
 |
Fig. 11. CZT sensor mounted on the robotic arm during the final workshop demonstration and gamma spectrum of the 195 measurement of a 241Am source. |
2.3.5. Contamination monitoring
The contamination monitoring developments included:
-
Upgrading a 14CO2 measurement system.
-
Developing two complementary surface contamination monitors:
-
∘
A pixelated β/γ monitor using modified plastic scintillators and
-
∘
A large surface monitor for α/β contamination.
-
∘
2.3.5.1 14CO2 measurement system
ENEA-INMRI designed and oversaw the upgrade of their cryogenic system for radioactive 14CO2 monitoring. Figure 12 shows the evolution of this prototype, from the stage before the start of the project, to the prototype manufactured by the end of the project.
 |
Fig. 12. From left to right, first prototype for gas trapping, design before, and after manufacturing by Air Liquide Italia. |
Designed to achieve continuous air collection from the demonstration room's atmosphere, cryogenic CO2 sequestration was demonstrated in-lab. Too big and power demanding, it was not meant to be mounted on the robotic platform, but the provided information was deemed relevant to further develop within the CLEANDEM project this air 14C contamination technology, particularly relevant to Advanced Gas-cooled Reactors (AGR) or Gas cooled Graphite moderated Reactors (GGR) D&D operations.
Characterization tests demonstrated to detect, through Liquid Scintillation Counting of the trapped CO2, concentration in air from environmental values (1.2 ppt of 14C/C) on.
2.3.5.2 β/γ pixelated surface contamination monitor
CEA developed and characterized a β/γ pixelated surface contamination monitor by selecting scintillators, designing mechanical frames, and improving electronics to achieve multichannel readout capability. As shown in Figure 13, it is modular by design, where each pixel can be assembled to create any shape (square, inline, etc.), making it adaptable to the various surfaces shapes encountered in facilities undergoing D&D.
 |
Fig. 13. CEAfs pixelated β/γ surface contamination monitor. 223 Left: electronic board, silicon photomultiplier (SiPM) on top of it, and plastic scintillators on top of both; making the sensing 224 unit of a pixel. Middle: 16 pixels assembled in a 4×4 square, with mylar cover for lightproofness. Right: 16-pixels 225 configuration embedded on the robotic arm during the final tests at AiNT premises. |
2.3.5.3 Large surface α/β contamination monitor
CAEN designed, and characterized at ENEA, a large surface contamination monitor to achieve α/β contamination measurement. As shown in Figure 14, the robotic platform and arm positioning achieved by TECNALIA and Ansaldo allowed to precisely set the sensors (and thus the contamination monitors) as close as possible to the surface, to allow measuring α and β contaminations.
 |
Fig. 14. CAEN's large surface α/β contamination monitor. |
2.4. Data fusion and digital twin
This Work Package led by RINA CSM with TECNALIA and ENEA, have developed the QPro Digital Twin platform, including software architecture, selected technologies, and data structures sourced from sensors, material samples, and historical databases.
As shown in Figure 15, the DT design includes structured data collection and storage, a user web interface with 3D functionality, and a BIM-based DT approach, where data can be accessed by selecting the corresponding placeholder in the user interface (see Fig. 16).
 |
Fig. 15. Diagram of data collection, fusion visualization and analysis for the Digital Twin. |
 |
Fig. 16. Point clouds with path followed by the UGV during one mission of the final tests at AiNT premises, and reconstructed 3D view of the tunnel where the demonstration took place during the final workshop, with arm path and placeholders of reports available within the Digital Twin. |
Orano's poStLAM software complements the DT for radiological data analysis and generation of real-time D&D scenarios, as visible in Figure 17. Figure 17 presents, dose rate maps and their retro projection in the 3D reconstruction of the tunnel where the final workshop in situ demonstration took place, with a “virtual” worker placed to calculate the dose they could receive in different scenarios.
 |
Fig. 17. Orano's poStLAM software and its integration within the QPro platform showing dose rate maps and 252 retroprojection in the tunnel where the demonstration during the final workshop took place. |
Alongside the technical developments exposed supra, two work packages focused on training, and the in-situ demonstrations during the final workshop, as well as the market alignment of the developed technologies, which are presented in the following sections.
2.5. Training, in situ demonstration
The aim of two work packages was to develop, test and evaluate a training programme, as well as demonstrate results obtained in the technical WPs and test the achieved technological innovations in a relevant environment.
The work package led by SOGIN developed a modular training program using case studies relevant to end-users and stakeholders, with AiNT's assistance, and contribution of Orano who were in charge of the Concepts of Operations. This work package also established an End-Users Network to assess and meet various application needs.
Two webinars with End-Users were held in September 22 and February 23 with the objective to:
-
Introduce the rationale of applying robotics in D&D operations;
-
Disseminate the CLEANDEM technology proposal to end users;
-
Spotlight the in-situ demonstration as an example for application of the robotic platform;
-
Gain end user feedback, through online surveys identifying
Among different feedbacks gained from the surveys, are the following information:
-
The need for a modular approach to allow larger flexibility in responding to changes with regard the use case, the features of the UGV and the group being targeted, and
-
The training context definition, requiring theoretical foundation, practical exercises and in-situ demonstration, and on-site training
These led to the organization of the CLEANDEM Final Workshop, which was held on April 17th 2024 at the Sogin EUREX (Enriched URanium Extraction) plant, a pilot nuclear fuel reprocessing facility built in 1965 by ENEA in Saluggia, Italy, under dismantling by SOGIN since 2003.
On this day, roadshows, presentations and in-situ demonstrations of the CLEANDEM platform in a real nuclear environment were given to the invited European stakeholders. Was also shown the implementation of the data collected by the platform in this hotspot localization-identification-mapping configuration. They were displayed in the 3D and fully detailed Digital Twin augmented with the radiological information provided by the sensors to improve radiation protection and the safety of decommissioning activities.
2.6. Market analysis
With the help of SOGIN and Orano, the objective of this work package led by CAEN was to estimate the social and economic impact CLEANDEM will have on the market.
To this end, they developed a comparative database, between the existing or commercially available, and the innovative technologies developed by the CLEANDEM Consortium (standalone and embedded on the platform); and develop an evaluation methodology useful for decommissioning cost estimation based on different scenario approaches from the CONOPS conclusions. The metrics used for this were a quantitative estimation of the Direct cost drivers that represent either time/money that can be linked to various activities and Qualitative evaluation of indirect cost drivers: that are referred to qualitative indicators related to the same activities, but that represent general concept that are not directly linked to an expense.
Their analysis highlighted substantial opportunities for enhancement in D&D activities. Areas such as data collection, quality, and traceability present significant potential for advancements. Furthermore, optimizing waste sorting and reduction, along with minimizing the overall environmental impact, emerges as crucial. The current strategies in these areas offer scope for further refinement and efficiency improvements.
3. Conclusions and perspectives – The XS-ABILITY project
The CLEANDEM project is now terminated and its developed technologies, procedure and methodologies can be continued, extended and/or upgraded in the European EURATOM framework, to other Dismantling & Decommissioning-related developments. This project has allowed to further develop radiation-sensing technologies, which can in and of themselves allow better measurements, but it also showcased the capability to embed many of them on an unmanned solution, paving the way to reducing human exposition to gather such data. By focusing on size and power consumption reduction, the CLEANDEM solution shows how multiple sensors can concurrently be sent on a UGV to achieve multiple measurements in one go (eg. ambient gamma/neutron dose rate while measuring floor/wall contamination); which is seldom achieved nowadays, where the UGVs usually embark only one sensor per robot mission. The CLEANDEM project also demonstrated how these data, gathered in a Digital Twin, provide in one interface, geolocated data from various sources to achieve better decision taking and planning of Dismantling & Decommissioning operations; which currently are mostly achieved by separately analysing such data. The higher reliability of these data (both the measurements’ value and their location) is also to be put into perspective for the acceptance of such technologies among the Dismantling & Decommissioning industry.
But because of the non-exposition of workers that is allowed by the unmanned systems developed within CLEANDEM, they can also be applied to any situation where unmanned intervention is to be privileged as much as reasonably possible, which is the case in RN-related security, safety or crisis management.
In these matters, partner entities have since collaborated to build, also with new partners and associated partners, proposals within these frameworks; among which, to the XS-ABILITY project proposal to the Horizon Europe 2023 Nuclear Research and Training “Innovative technologies for safety and excellence in decommissioning, including robotics and artificial intelligence” call (NRT-01-07).
The XS-ABILITY project, coordinated by CEA, will start October 2024 and, for three years, seven leading actors of European nuclear research (CEA, IFE, VTT and SCK-CEN) and private sector (CAEN Flyability and Sigma) will extend and upgrade CLEANDEM's achievements by addressing the issue of hard-to-measure radioactivity in/and hard-to-access locations.
To reach this objective, XS-ABILITY will develop and deploy a swarm of autonomous Unmanned Ground and Aerial Vehicles equipped with advanced radiation detection technologies, the sensors will be enhanced with AI-based algorithms and methodologies for accurate 3D scene reconstruction that will ease the situational analysis for humans and AI.
The collected data could, then, be implemented in any D&D digital-twin and supervision platform, such as the one form the PLEIADES European project, and its follow-up project, DORADO. Combining these information with legacy facility data into such a platform, will significantly enhance the planning and traceability of D&D operations, thanks to more accurate, more reliable, and up-to-date information, hence cheaper, and safer for D&D workers.
Based on the nuclear and D&D field expertise of the consortium, reflecting the needs from end-users and stakeholders, the technologies which will be deployed by 2027 on UxVs (unmanned vehicles) are gamma spectrometry and localization sensors, probes for gamma/neutron detection and source identification, and contamination monitoring probes for soil and wall monitoring.
The sensors will be deployed on a fleet of UxVs, consisting of three UGVs (4-legged and 4-wheeled), and two UAVs. A robotic platform will also be used to scan large surfaces at higher heights.
These UxVs, provided by members of the Consortium, will be enhanced with higher capabilities by developments on Multi-robot task allocation, path planning, autonomous navigation and obstacle avoidance, as well as Multi-Agent Simultaneous Localization and Mapping (MASLAM).
A final layer of developments will be devoted to:
-
data fusion and algorithms, using implicit neural scene reconstruction (including radiology), and
-
AI for predictive analytics and multi-robot mission scheduling.
The systems will be qualified in a representative environment, according to case study scenario.
Acknowledgments
The authors would like to thank the participants to the CLEANDEM project for their contribution, involvement, and sometimes hard dedication to the success of this work: With CEA: Sylvain Magne, Guillaume Bertrand, Jean-Philippe Poli, Florian Tanneau, and Vincent Schoepff. With Orano DS: Camille Theroine and Eric Breuil with CAEN Spa: Erica Fanchini, Alessandro Iovene, and Ferdinando Giordano. With ENEA: Luigi Lepore, Matteo Corbo, Pierino de Felice, Marco Capogni, and Mauro Capone. With INFN: Paolo Finocchiaro, Marco Ripani, Mikhail Osipenko, Fabio Rossi, Luigi Cosentino, Fabio Longhitano, Paolo Musico, Gaetano Elio Poma, Felix Pino, and Sandra Moretto. With SOGIN: Federica Pancotti, Rossella Sciacqua, and Enrico Barbaso. With TECNALIA: Iván Villaverde and Iñaki Iglesias Aguinaga. With AiNT: Martin Dürr and Bo Fu. With ARTTIC: Andrea Bassotti and Isabelle Forcier. As well as Gabriele Firpo, with Ansaldo Nucleare.
Funding
CLEANDEM project has received funding from the European Union's Horizon 2020 EURATOM Research & Training Programme 2019–2020 under the Grant Agreement #945335. XS-ABILITY project has received funding from the European Union's Horizon Europe EURATOM Research & Innovation program under agreement #101166392. PLEIADES project has received funding from the EURATOM Research & Training Programme 2019–2020 under the Grant Agreement n° 899990. DORADO project has received funding from the EURATOM call HORIZON-EURATOM-2023-NRT-01-07 under the Grant Agreement n° 101165990. Views and opinions expressed are however those of the authors only and do not necessarily reflect those of the European Union or the European Commission-Euratom. Neither the European Union nor the granting authority can be held responsible for them.
Conflicts of interest
The authors declare that they have no competing interests to report.
Data availability statement
In agreement with the FAIR principle, on data organisation so they can be more easily Findable, Accessible, Interoperable and Reusable, and the “Programme Guidelines to the Rules on Open Access to Scientific Publications and Open Access to Research Data in Horizon 2020”; disclosable data are available in the following repository: https://zenodo.org/communities/cleandem_project/
Author contribution statement
The full paper has been written collaboratively with the contribution of all the authors.
References
- Robotnik® , “RB-VOGUI: Autonomous Mobile Robot for indoor and outdoor | Robotnik® ”, 26 November 2024 [Online], https://robotnik.eu/products/mobile-robots/rb-vogui/#rb-vogui-plus, [Accessed 23 January 2025] [Google Scholar]
- A. Koubaa, Robot Operating System (ROS), Studies in Computational Intelligence (Springer International Publishing, New York City, Cham, 2016), Vol. 625, pp. 99–120 [CrossRef] [Google Scholar]
- R. Smith, E. Cucco, C. Fairbairn, Robotic development for the nuclear environment: challenges and strategy, Robotics 9, 94 (2020) [CrossRef] [Google Scholar]
- P. Fankhauser, M. Hutter, in A Universal Grid Map Library: Implementation and Use Case for Rough Terrain Navigation, edited by A. Koubaa (Springer International Publishing, New York City, Cham, 2016), Vol. 625, pp. 99–120 [Google Scholar]
- G. Amoyal, V. Schoepff, F. Carrel, M. Michel, N. Blanc de Lanaute, J.-C. Angélique, Development of a hybrid gamma camera based on Timepix3 for nuclear industry applications, in Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment (2021), Vol. 987, pp. 1–9 [Google Scholar]
- F. Longhitano, G. Poma, L. Cosentino, P. Finocchiaro, A Scintillator array table with spectroscopic features, Sensors 22, 4754 (2022) [CrossRef] [PubMed] [Google Scholar]
- G. Amoyal, V. Schoepff, F. Carrel, L. Tondut, C. Helbert, M. Fiederle, A. Fauler, J. Plagnard, R. Abou Khalil, Z. Mekhalfa, M. Imbault, Nanopix-v1: A compact miniaturized coded-aperture gamma imager, in Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment (2024), Vol. 1068, pp. 1–10 [Google Scholar]
- N. Kosa, Draw-tower gratings in multicore fiber: A paradigm shift in curvature sensing, 1 April 2017, https://www.medicaldesignbriefs.com/component/content/article/26703-draw-tower-gratings-in-multicore-fiber-a-paradigm-shift-in-curvature-sensing [Accessed 23 January 2025] [Google Scholar]
- S. Magne, P. Ferdinand, Système de mesure distribuée des courbures d’une structure, World Patent WO2005088375A1, 22 September 2005 [Google Scholar]
- J.P. Moore, M.D. Rogge, Shape sensing using multicore fibre optic cable and parametric curve solutions, Opt. Exp. 20, 2967 (2012) [CrossRef] [Google Scholar]
Cite this article as: Maugan Michel, Guillaume Amoyal. From robots to drones, the future of decommissioning operations – The CLEANDEM and XS-ABILITY projects, EPJ Nuclear Sci. Technol. 11, 15 (2025). https://doi.org/10.1051/epjn/2025013.
All Figures
|
Fig. 1. Overview of the developments carried out within the CLEANDEM project. |
| In the text | |
|
Fig. 2. RB-VOGUI UGV platform (Robotnik) equipped with an UR 5e robotic arm (Universal Robots), and embedded 99 sensors for localization and navigation. |
| In the text | |
|
Fig. 3. 2.5D navigation solution developed by TECNALIA, integrating 3D Lidar reconstruction (upper left), 2D path planning, through floor extraction from 3D map as a surface (2.5D map, upper right, achieved using the grid_map module [4] in [2]), transitability estimation from slope, and terrain roughness and planning (lower left) and control using the Robot Operating System (ROS) navigation stack (lower right). |
| In the text | |
|
Fig. 4. Robotic platform configurations, for ambient gamma and neutron measurements (left), surface contamination monitoring (centre), and gamma hotspots localization and identification (right), through spectro-imaging [5]. |
| In the text | |
|
Fig. 5. MiniRadMeter gamma counter/spectrometer and gamma-blind MiniSiLiF neutron counter (upper left), mounted on the UGV during the final workshop demonstration (upper right), and neutron (lower left) and gamma (lower right) spectra measured during the final tests at AiNT premises. |
| In the text | |
|
Fig. 6. Robotic platform next to drum containing a 241Am source during the final tests at AiNT (left) and 2D mapping 140 showing the localization and identification of the four radioactive sources in the room (right). |
| In the text | |
|
Fig. 7. Nanopix3 gamma spectro-imager and multisource spectrum measured during the final tests and, during the final workshop demonstration, measuring a 241 Am source inside a waste drum. |
| In the text | |
|
Fig. 8. INSPECT system, for 1D dose data acquisition (left), and shape sensing principle for 3D localization (right). |
| In the text | |
|
Fig. 9. SNIPER-GN 2.0 and GAMON-Drone measurement systems mounted on the UGV. |
| In the text | |
|
Fig. 10. Point cloud of the AiNT premises and measured radiation intensity measured in the wake of the platform's path 188 (bottom left), and picture of the platform undertaking such mission (top right). |
| In the text | |
|
Fig. 11. CZT sensor mounted on the robotic arm during the final workshop demonstration and gamma spectrum of the 195 measurement of a 241Am source. |
| In the text | |
|
Fig. 12. From left to right, first prototype for gas trapping, design before, and after manufacturing by Air Liquide Italia. |
| In the text | |
|
Fig. 13. CEAfs pixelated β/γ surface contamination monitor. 223 Left: electronic board, silicon photomultiplier (SiPM) on top of it, and plastic scintillators on top of both; making the sensing 224 unit of a pixel. Middle: 16 pixels assembled in a 4×4 square, with mylar cover for lightproofness. Right: 16-pixels 225 configuration embedded on the robotic arm during the final tests at AiNT premises. |
| In the text | |
|
Fig. 14. CAEN's large surface α/β contamination monitor. |
| In the text | |
|
Fig. 15. Diagram of data collection, fusion visualization and analysis for the Digital Twin. |
| In the text | |
|
Fig. 16. Point clouds with path followed by the UGV during one mission of the final tests at AiNT premises, and reconstructed 3D view of the tunnel where the demonstration took place during the final workshop, with arm path and placeholders of reports available within the Digital Twin. |
| In the text | |
|
Fig. 17. Orano's poStLAM software and its integration within the QPro platform showing dose rate maps and 252 retroprojection in the tunnel where the demonstration during the final workshop took place. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.